集群密度控制:Wasserstein 跟踪与非完整系统镇定
这篇 note 联读两篇把“集群控制”提升到“概率密度演化控制”的论文:一篇从 2-Wasserstein 几何讨论连续体 swarm 的最优跟踪,另一篇处理非完整约束下的密度镇定。 前者回答“往哪走、走多快”,后者回答“当个体受运动学约束时,密度反馈如何仍然可达且可稳”。
P1 把密度跟踪写成 Wasserstein 流形上的几何最优控制,P2 则说明在非完整约束下,集群密度依然可以通过可达性与局部反馈被稳定到目标分布。
1. 问题与文献定位
这两篇文献的共同点,是都不再把控制目标停留在单个 agent 的轨迹层,而是直接控制集群在空间上的分布形态。差别在于:P1 讨论的是 tracking 与运动代价之间的几何折中,P2 处理的是非完整约束下的 stabilization 与可达性问题。P1 对应的是 CDC 2023 会议论文,并保留 arXiv 版本;P2 已发表于 IEEE TAC 2024,预印本见 arXiv[R1][R2]。
2. P1:Wasserstein 空间中的几何降维与调度
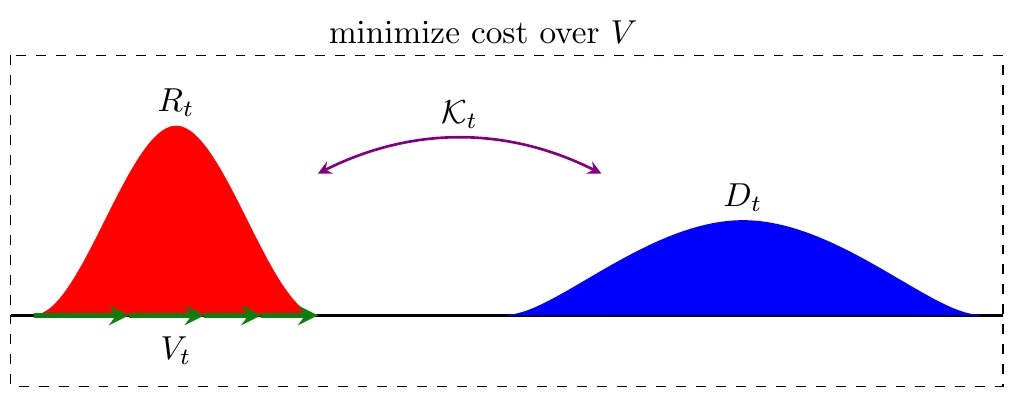
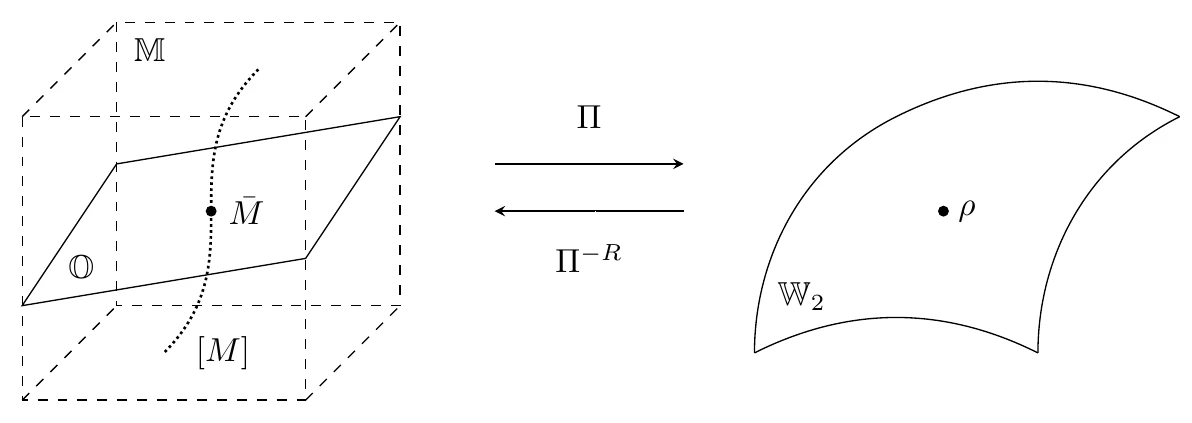
P1 的关键做法是把原始 PDE 控制问题改写成 Wasserstein 空间 $\mathcal{W}_2$ 上的曲线优化问题。这样一来,原来混在一起的“匹配代价”和“移动代价”,可以分别落到密度间距离与流形速度上。
关键
- 把控制输入 $V_t$ 诱导的运动耗散,通过连续性方程与 Benamou-Brenier 表述,解释为密度曲线 $R_t$ 在 Wasserstein 流形上的速度平方 $|R_t'|^2$。
- 在静态目标分布 $D$ 下,最优密度演化不再需要在函数空间里“盲搜”,而是被压缩为沿 $R_0 \to D$ 的 Wasserstein 测地线前进。
- 因此,“往哪走”由几何测地线决定,“走多快”退化为一个一维标量调度问题,对应的反馈律可写成 $$V_t = -\frac{f(t)}{\alpha}(\mathcal{I} - \bar{M}_t),$$ 其中 $\bar{M}_t$ 是当前分布到目标分布的最优传输映射。
这一步最重要的收益,不只是得到一个漂亮的公式,而是把无穷维最优控制里的“空间方向”和“时间调度”拆开了。对后续做近似实现或模型预测控制,这种分层非常关键。
3. P2:非完整约束下的可达性与密度镇定
P2 的关键点不在于再做一次椭圆型扩散稳定性分析,而在于把个体的非完整运动学约束保留下来。由于生成元退化为次椭圆算子,常见的强椭圆工具不能直接照搬,因此需要先证明可达,再讨论稳定。
关键
- 若受限向量场满足 Hörmander 条件,则虽然个体运动学是退化的,但对应算子仍能建立闭性、自伴性与正半群,从而保证宏观密度演化模型本身是合法的。
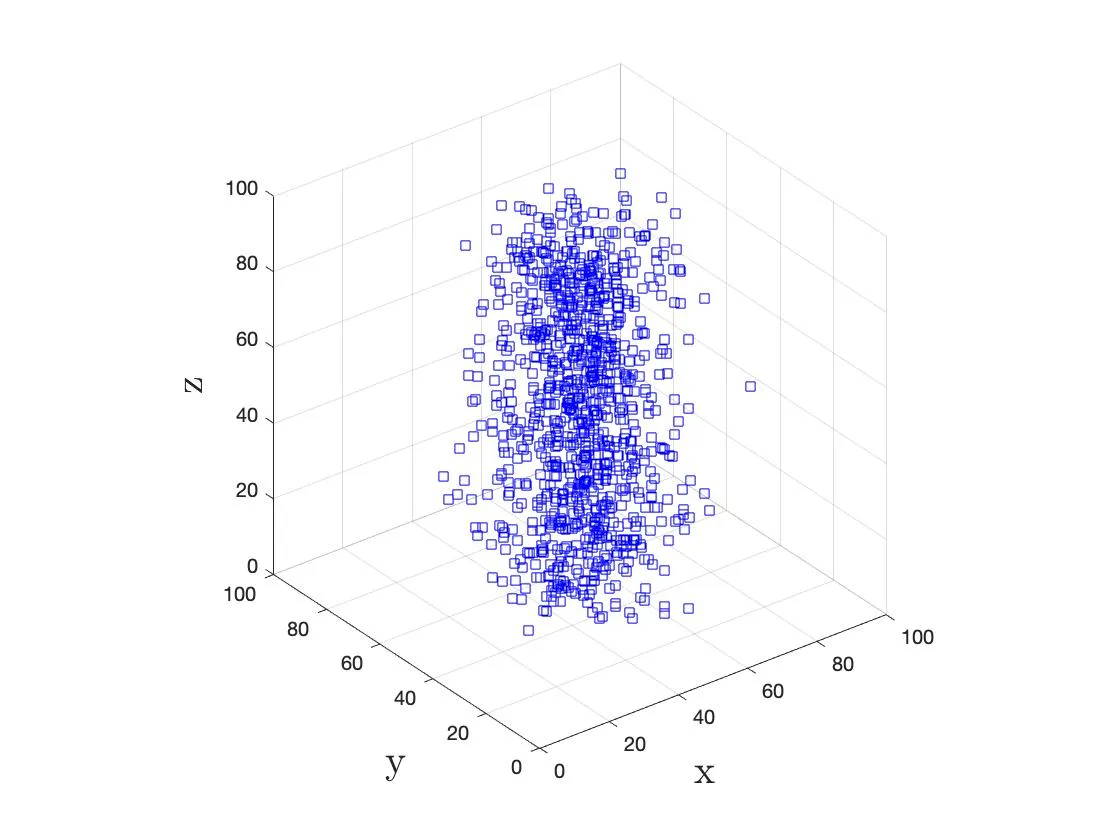
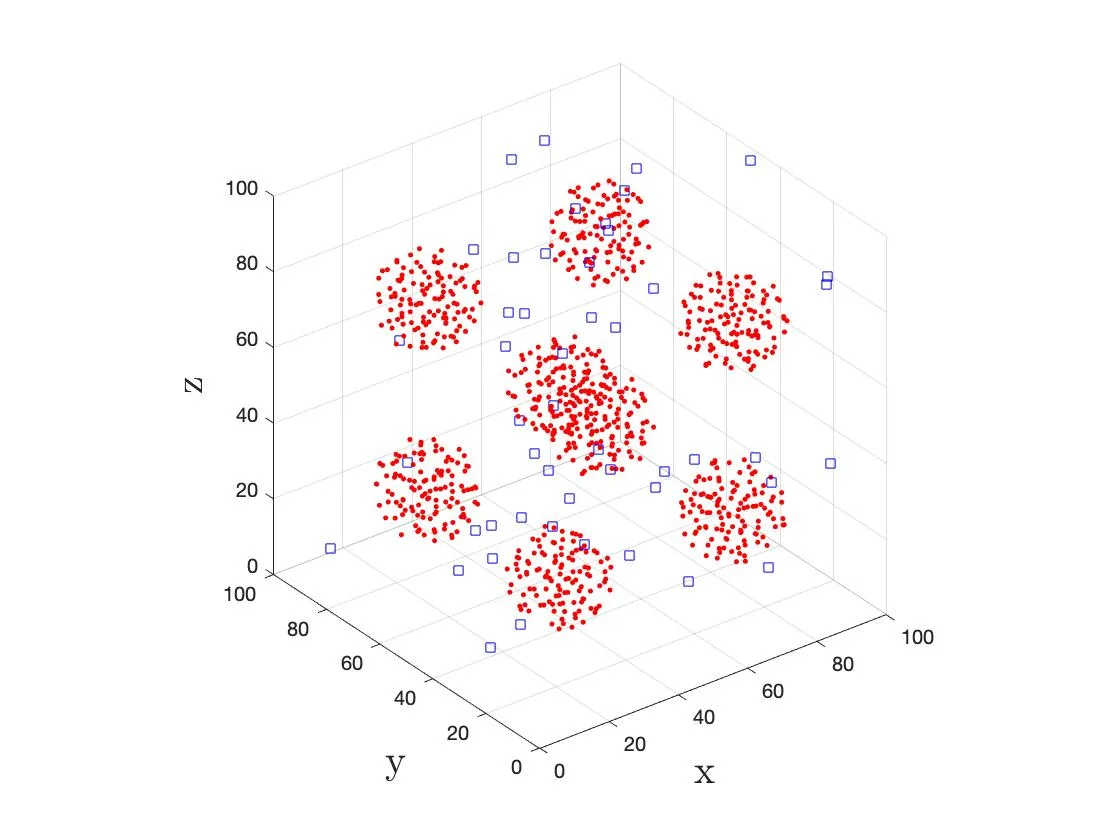
- 当目标密度有严格正下界时,可以构造状态反馈使系统指数收敛到目标密度。
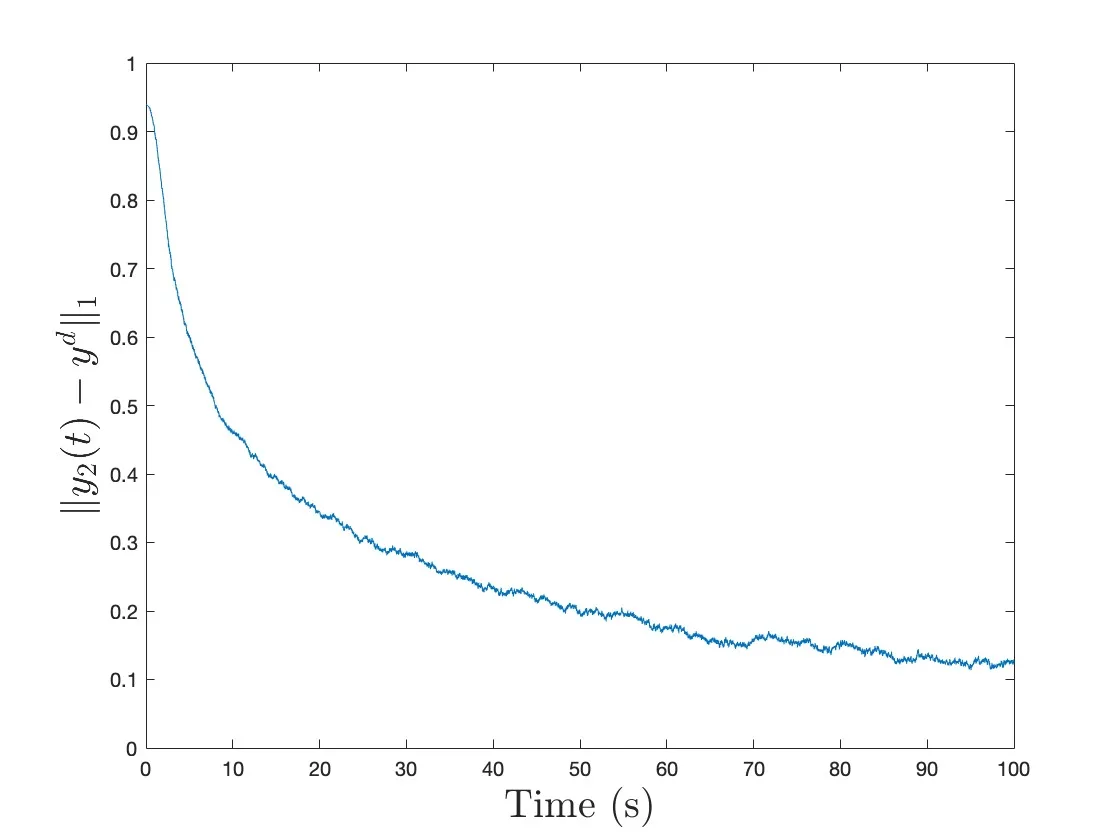
- 为了处理更实际的“目标分布含空腔”情形,文中引入 hybrid switching diffusion 与局部密度反馈 $$ (F_i(f))(x) = r_i\bigl(f(x) - y^d(x)\bigr), $$ 并进一步证明对应的半线性 PDE 在 $L^1$ 意义下全局渐近稳定。
4. 两点启发
如果把问题放回塑形视角,这两篇文献真正提供的不是“更多功能”,而是两类底层结构。
- 度量层: P1 说明密度控制里“代价几何”不是附属品,而是核心建模对象。有限维系统里的动能矩阵,在这里被 2-Wasserstein 度量接管;控制器首先要决定的是在什么几何下比较两条密度轨迹。
- 受限驱动层: P2 说明即使瞬时可控方向不够,仍然可以借助李括号可达性、交互扩散与局部密度反馈,在宏观分布层实现稳定。这为把欠驱动或非完整约束引入密度层面的塑形提供了合法性基础。
5. 参考文献
- Max Emerick, Bassam Bamieh. Continuum Swarm Tracking Control: A Geometric Perspective in Wasserstein Space. In 62nd IEEE Conference on Decision and Control (CDC), pp. 1367-1374, 2023. DOI · arXiv
- Karthik Elamvazhuthi, Spring Berman. Density Stabilization Strategies for Nonholonomic Agents on Compact Manifolds. IEEE Transactions on Automatic Control, 69(3):1448-1463, 2024. DOI · arXiv