机器人动力学与控制研究记录
本文归档我在 2021 年前后开展的一组机器人动力学与控制相关工作,覆盖最优控制、反应规划、逆运动学/关节控制三条主线。 内容以阶段性可复现结果和动画展示为主,侧重方法路径与结果特征的梳理。
- 最优控制:机械臂避障轨迹规划问题的复现与数值验证。
- 反应规划:几何力学框架下反馈 Hamel 变分积分子与回转力避障。
- 逆运动学控制:多类机器人模型的关节位置/速度/前馈/计算力矩控制实践。
最优控制复现:三连杆机械臂避障
该部分聚焦机械臂最优轨迹规划与避障约束处理,参考文献为
Gerdts M (2011)
关于路径规划与碰撞规避的工作。
我在 Matlab 中基于 fmincon 结合 Euler 积分实现数值求解,复现了论文同类场景下的求解行为与轨迹特征。
在当时的场景设置下,求解得到的终止时间为 t_f = 0.4412s。
在调参过程中,初值选择、控制量缩放与约束平衡对收敛稳定性影响较大。
在这一阶段,特别感谢 Matthias Gerdts 教授提供的持续指导。关于初值构造、同伦路径与缩放策略的建议, 对复现工作从“可求解”走向“稳定收敛”起到了关键作用。
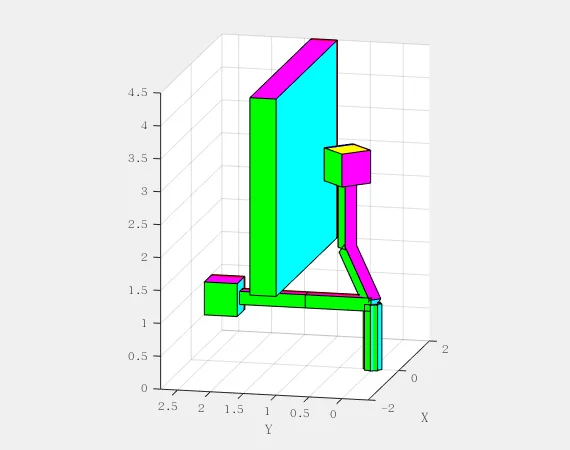
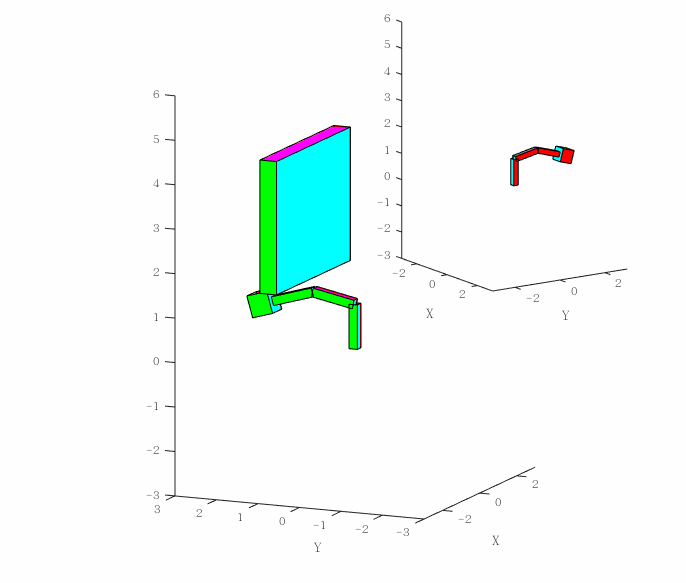
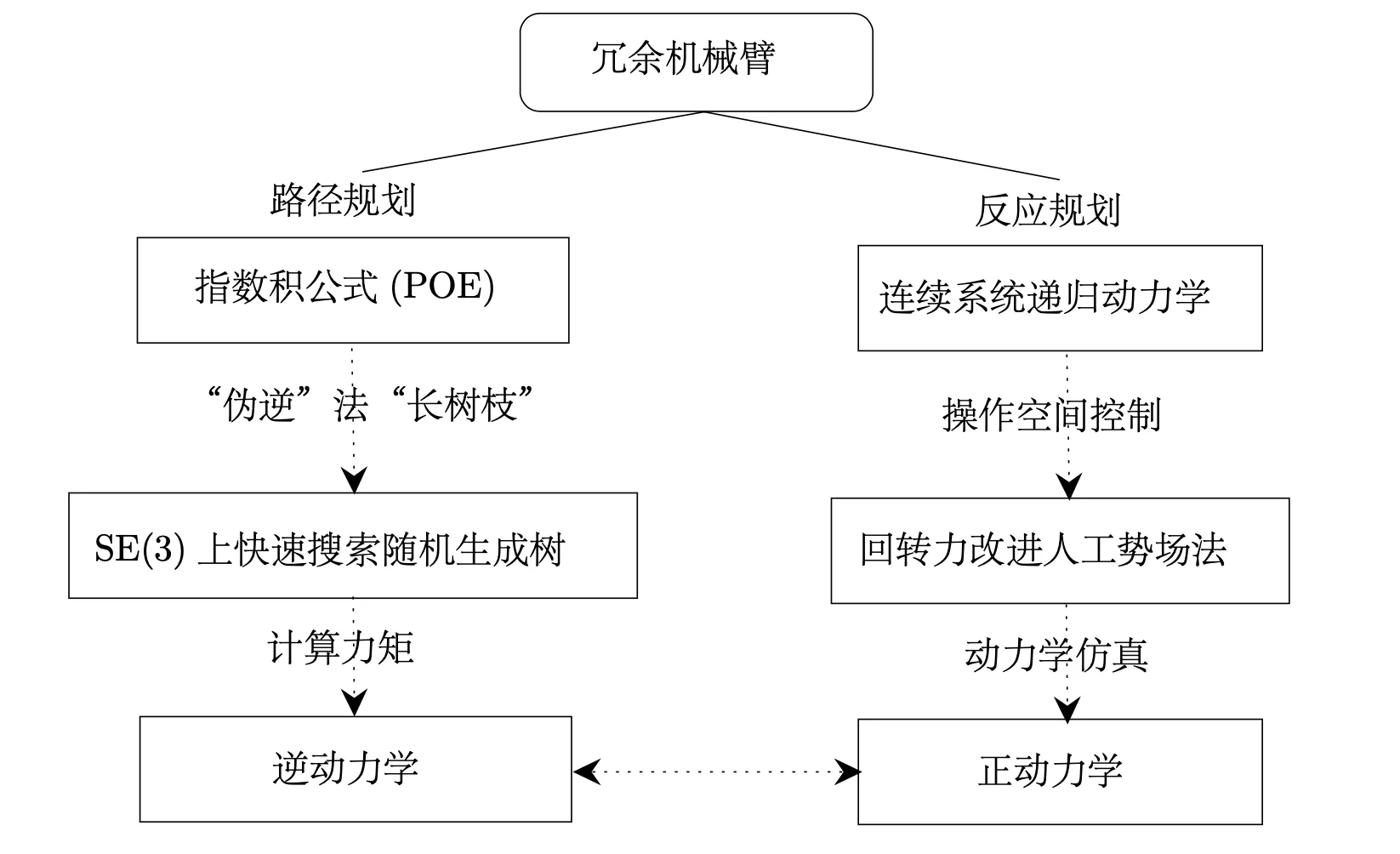
反馈 Hamel 变分积分子与反应规划
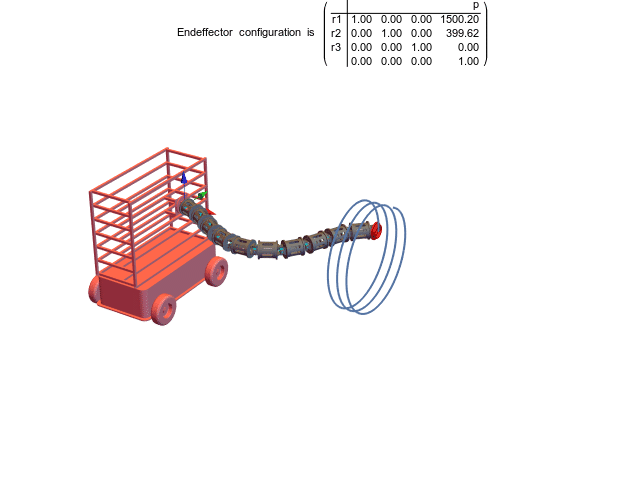
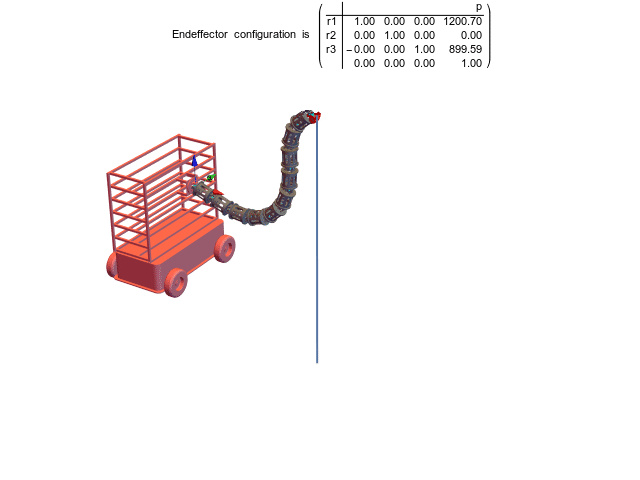
在几何力学框架下,我们推导了开链机械臂的反馈 Hamel 变分积分子,并通过反馈控制算法实现积分子求根; 随后将其用于反应规划正向动力学计算。 在此基础上,将回转力引入传统人工势场法设计斥力项,用于避免局部极值问题,实现整臂实时避障轨迹规划。
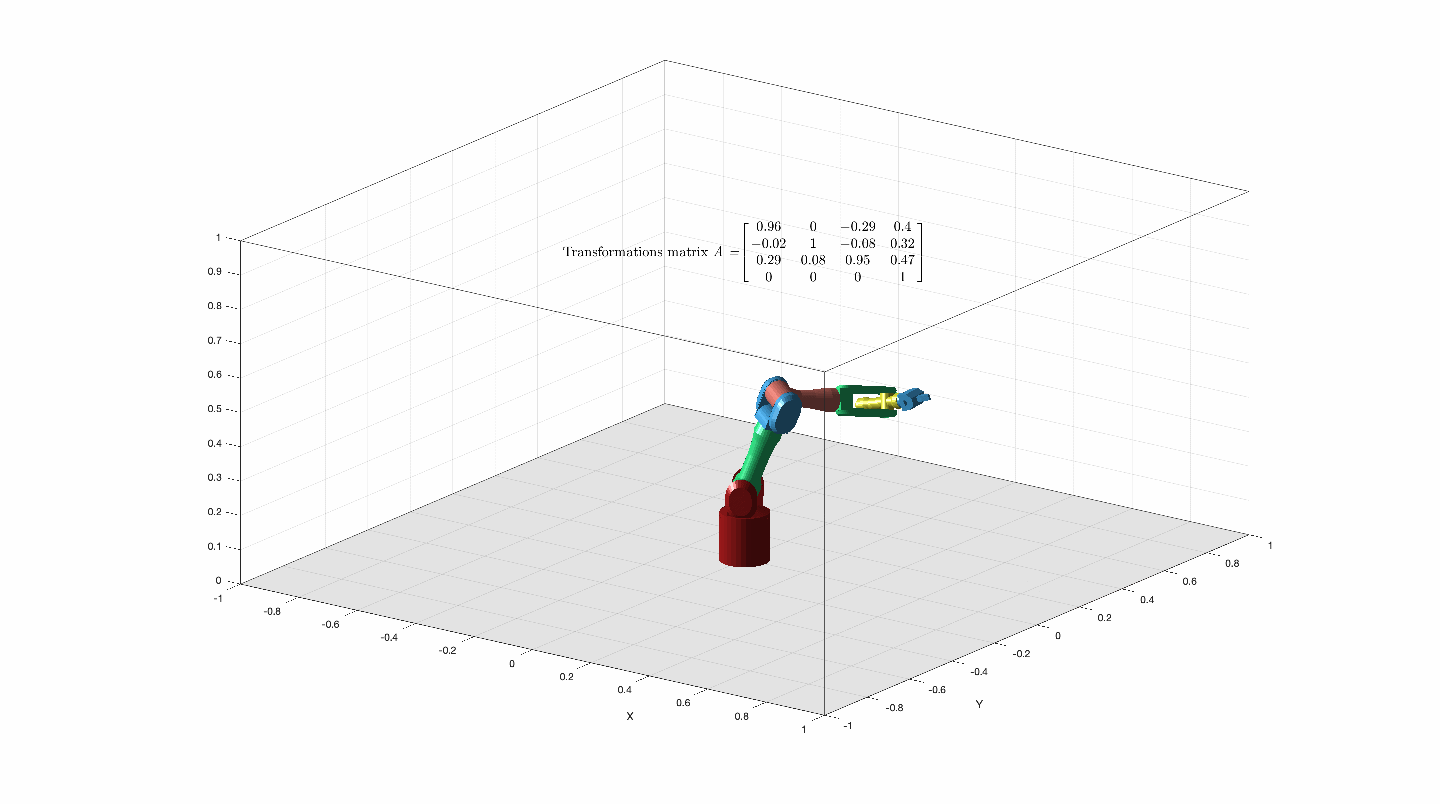
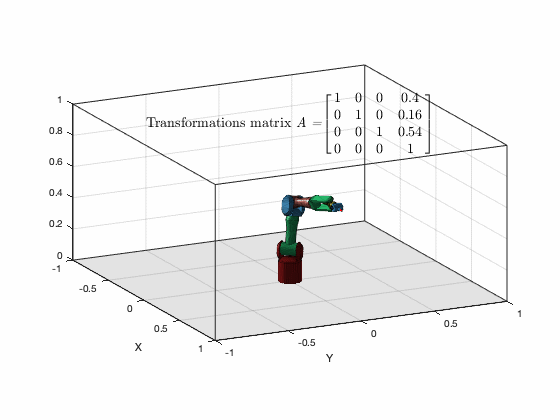
逆运动学与关节控制:多模型验证
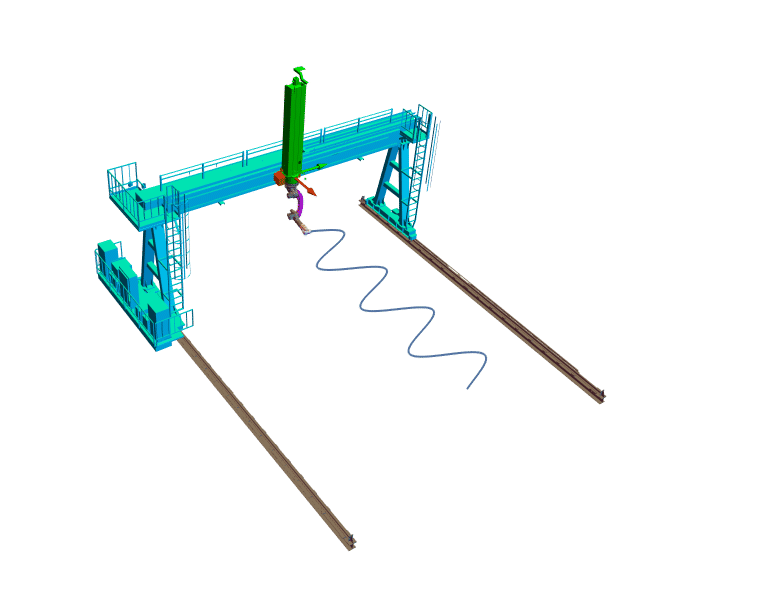
该阶段完成了多类机器人系统的运动学/动力学建模,并实现关节位置环、速度环、模型前馈与计算力矩等控制算法, 目标是保证各关节对给定轨迹的稳定、高精度跟踪。
蛇形机器人模型
工业机器人与门架系统
小结
回看这批工作,最大的收获并不只是算法实现本身,而是形成了从建模、数值方法、规划到控制落地的一体化流程意识。 早期在最优控制与避障问题上的处理经验,也为后续更复杂模型的研究提供了实践基础。
在此感谢当时给予指导和建议的老师与合作者。很多关键细节(如初值构造、同伦思路、缩放策略)对推进工作起到了直接作用。
参考:Gerdts, M., Henrion, R., Hömberg, D., & Landry, C. (2011). Path planning and collision avoidance for robots.
相关工作:沈伟清, 王本亮, 史东华. 开链机械臂的反馈 Hamel 变分积分子. 动力学与控制学报, 2022, 20(3): 8-14.